Differential Steering
Differential steering is when you have two wheels and they move independently. To go forward and backwards, you make both of the wheels move the same speed. To turn left and right, you either have one wheel stop while the other still moves, or you make one of the wheels move slower than the other. The advantages of this type of steering include being able to turn without moving forward. The downside is that it is harder to balance, as well as the motors always have to be going the same speed, which can be slightly harder to achieve than other types of steering.
Car Type Steering
Car type steering has the back wheels provide power and the two wheels in front steer, although they could all be powered. Advantages include more power and better balance, while disadvantages include having to be moving forward to turn around.
Three Wheel Steering
Three wheel steering is like car type, but instead of two wheels in the front there is one, and front wheel is almost never powered. Its disadvantages and advantages are the same as car type steering, but it does not have the advantage of balance as much as car type.
Omnidirectional Steering
Omnidirectional steering is where we have a shape (I’m using a triangle) with three wheels on it. The two red ones are the front, and the blue one is the back.
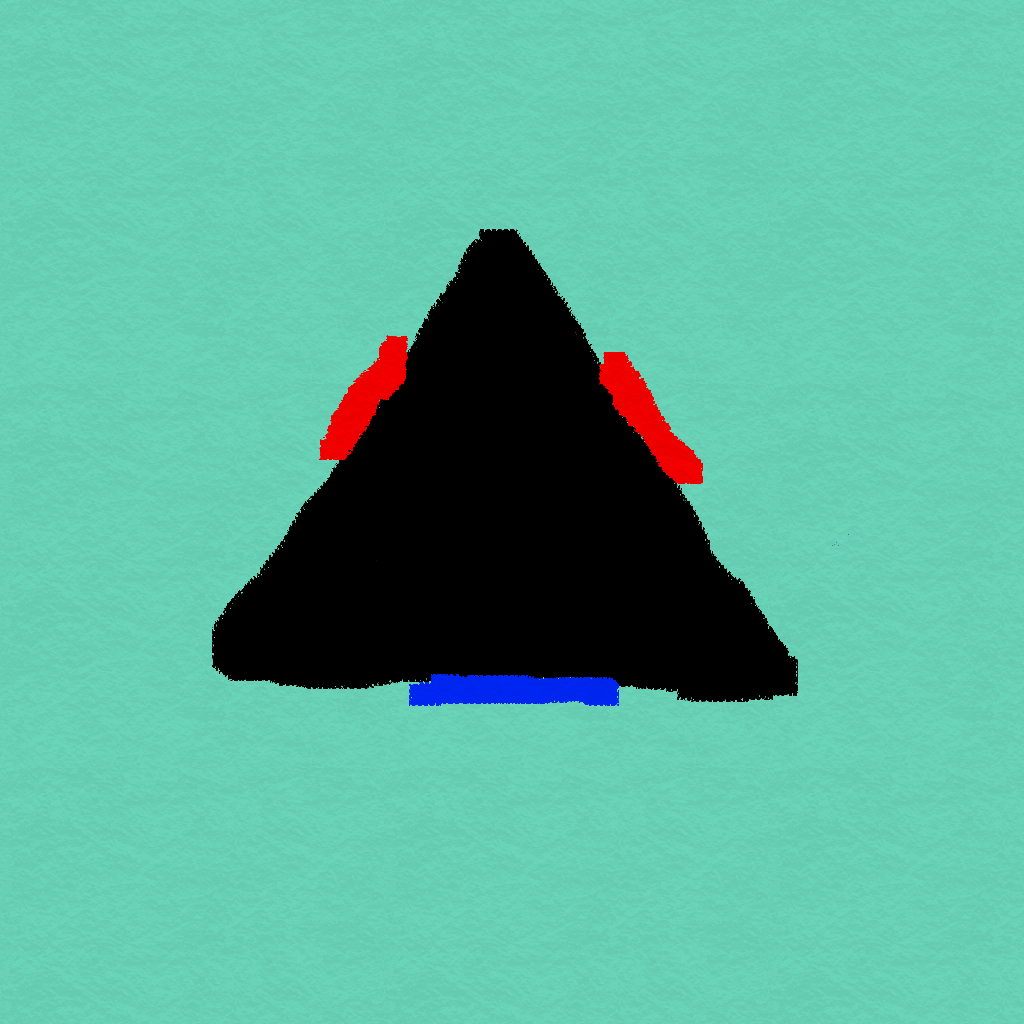
The front wheels are what move it forward while the back sits idle, and one of the front wheels along with the back can pull it in another direction. To turn around, all the wheels move in one direction. An advantage of this type is being able to turn very precisely and accurately. Disadvantages include only being able to move in three directions (with this particular setup of three wheels) and the idle wheel on the back causing friction which can slow the robot down.